
MIRV - Internship
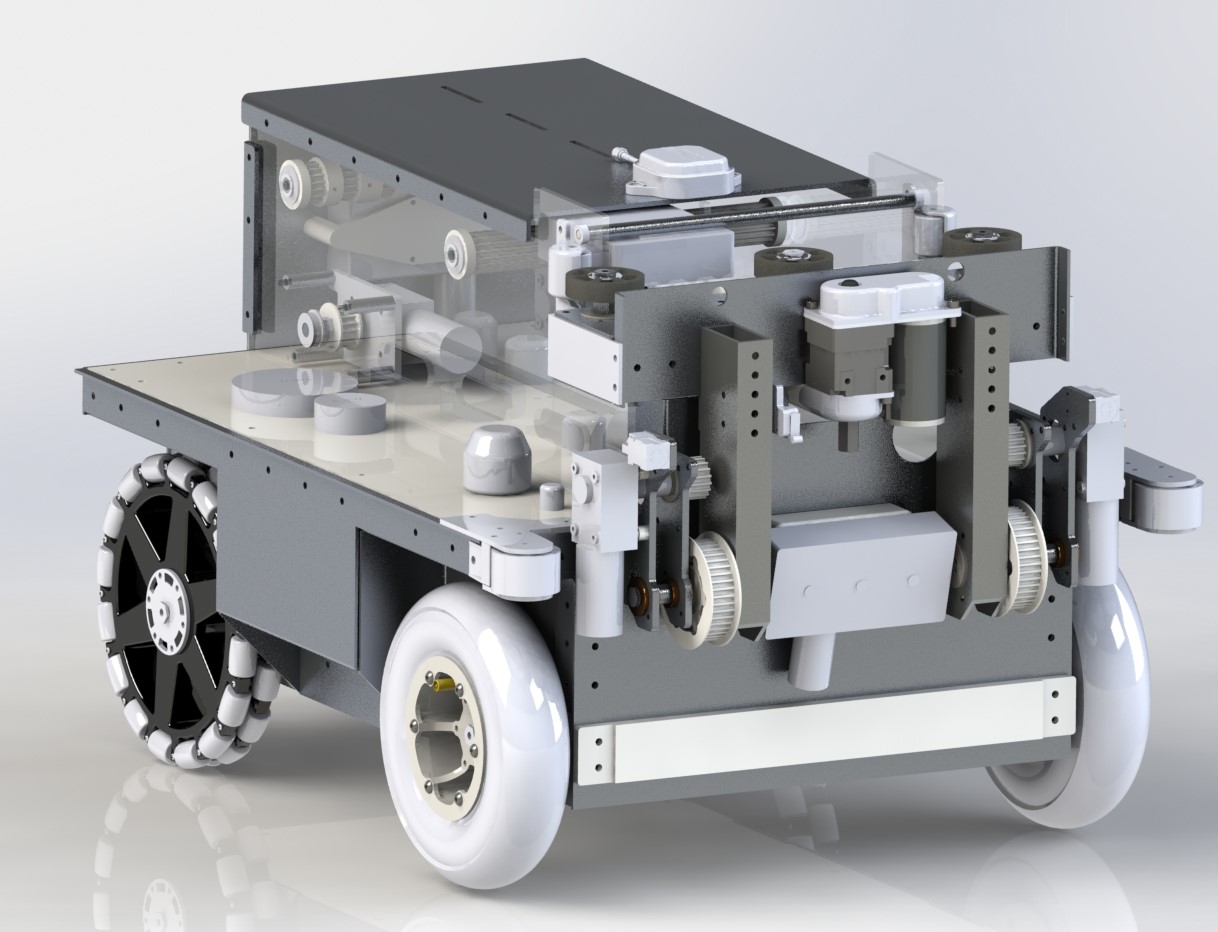
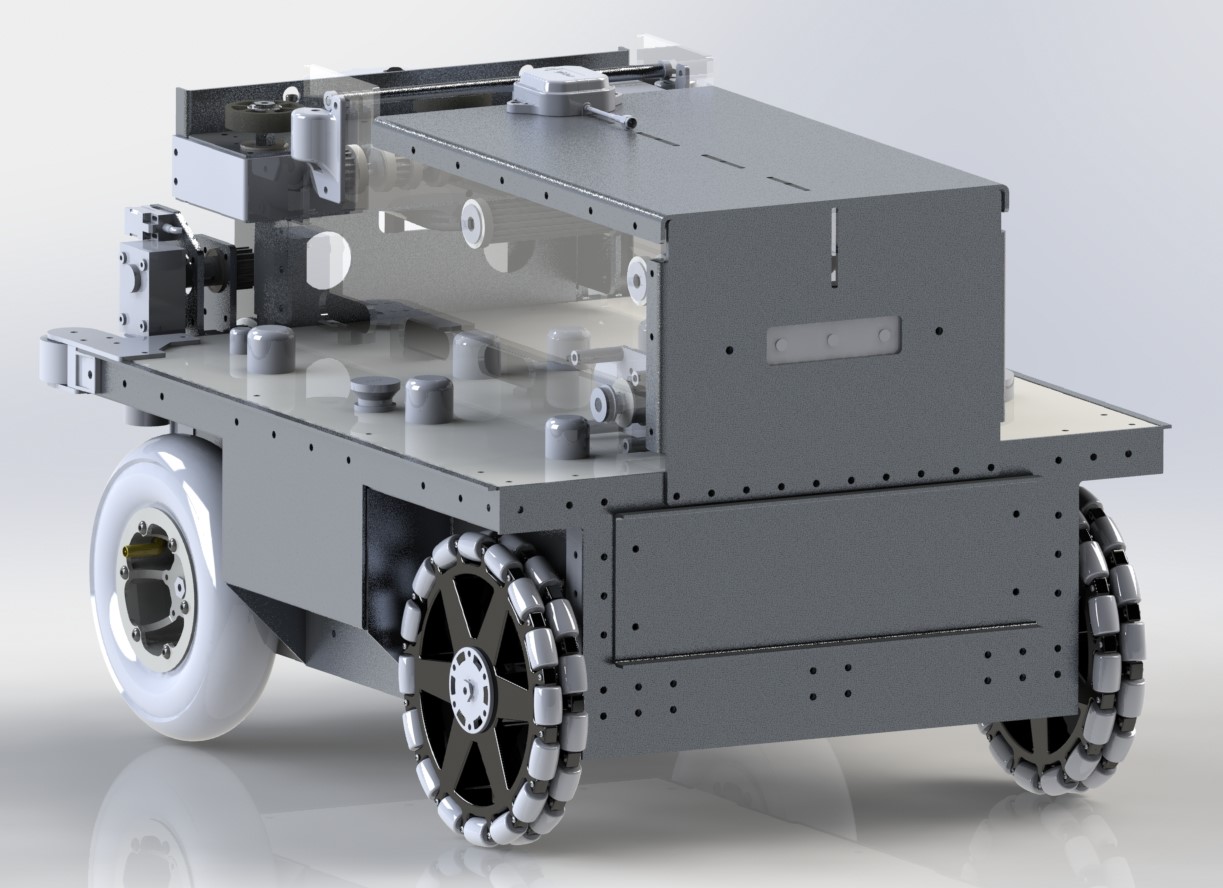
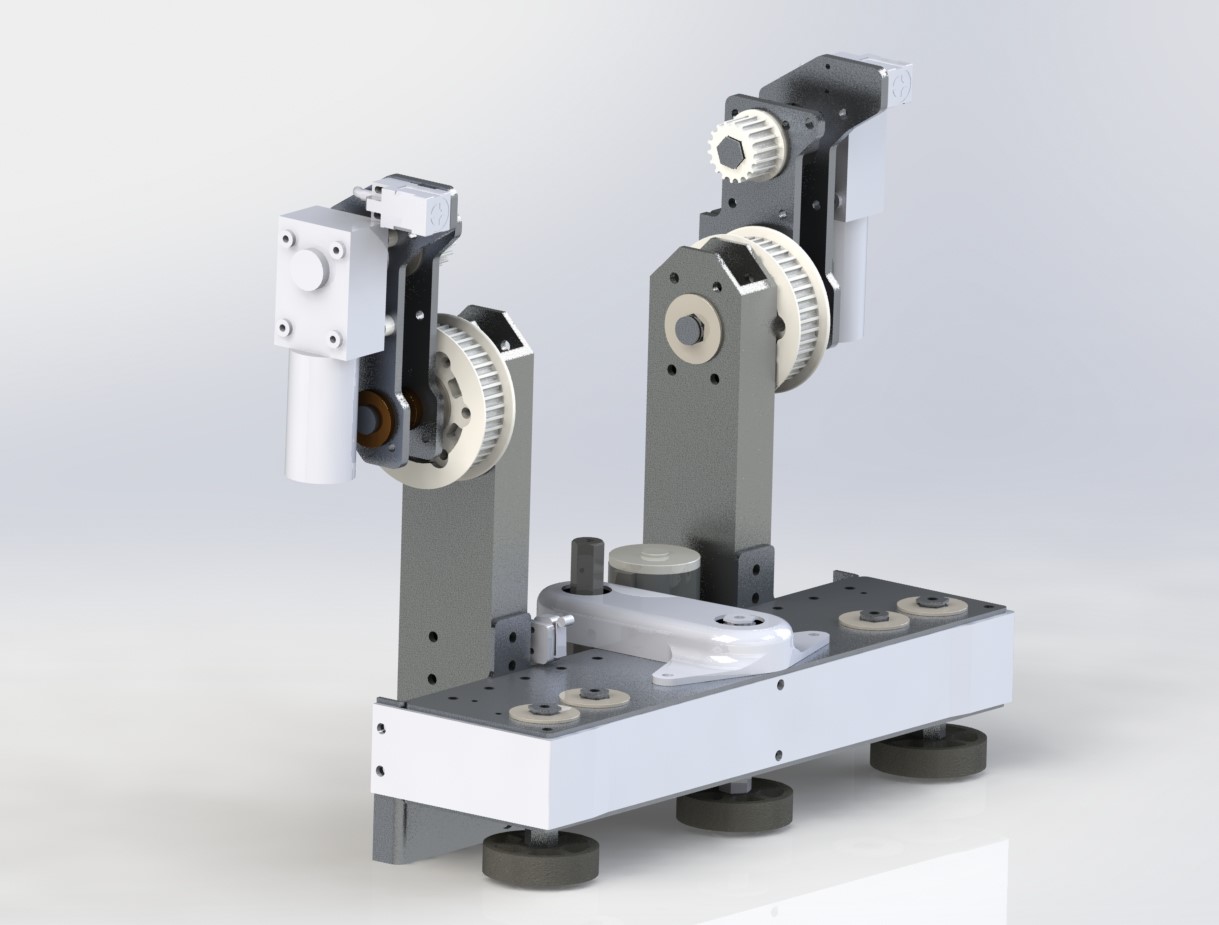
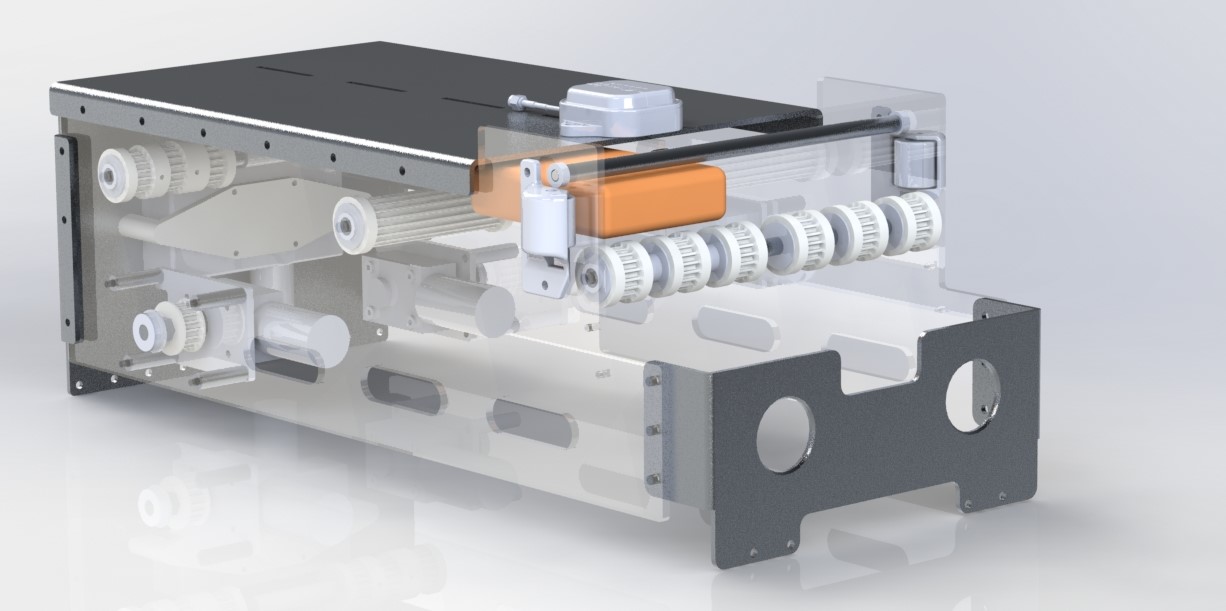
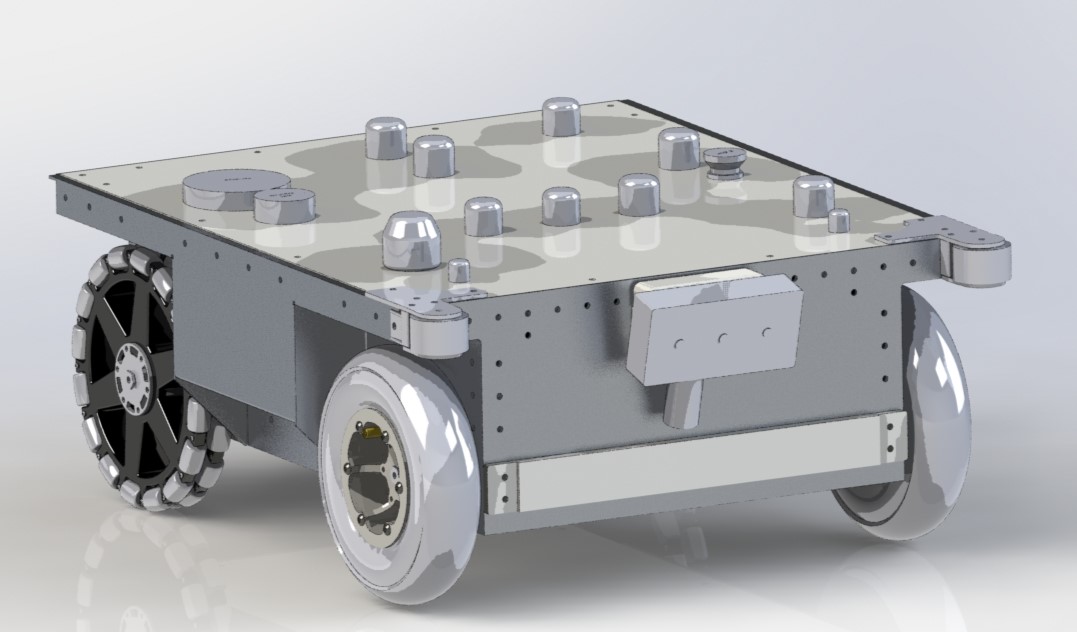
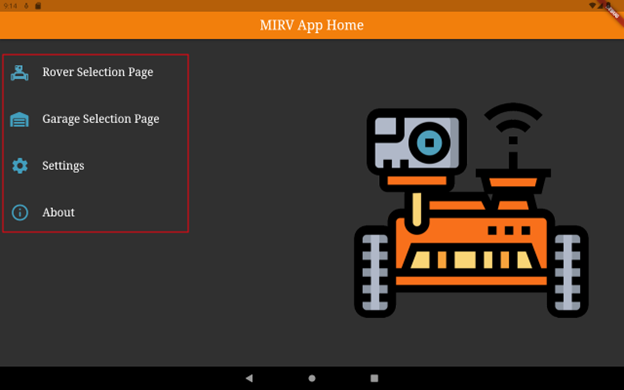
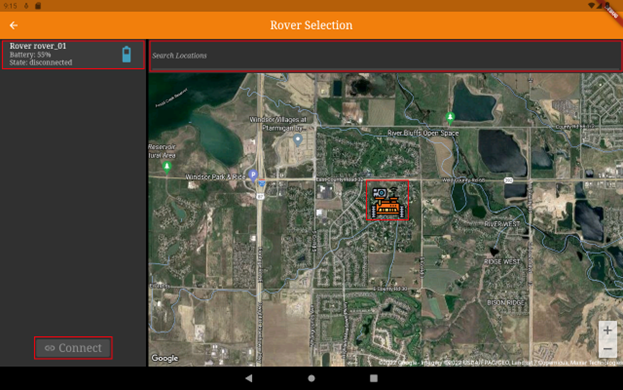
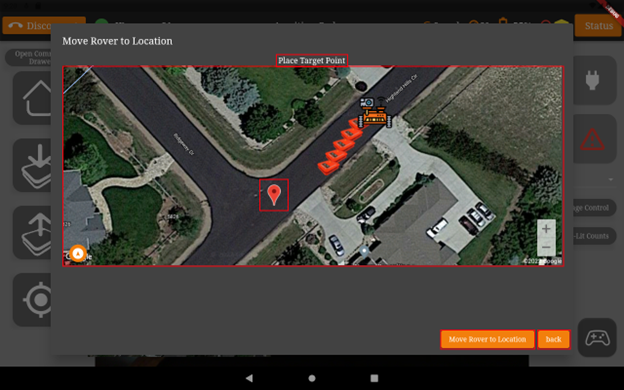
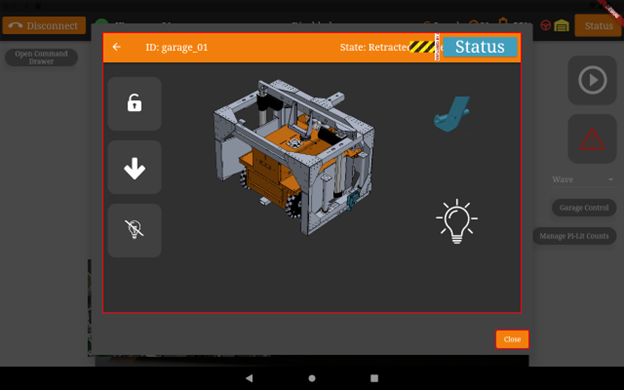
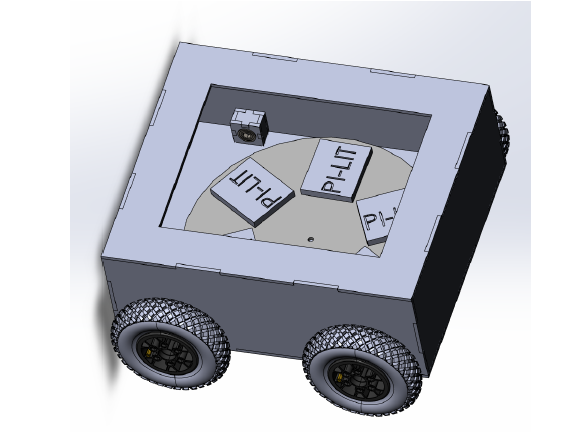
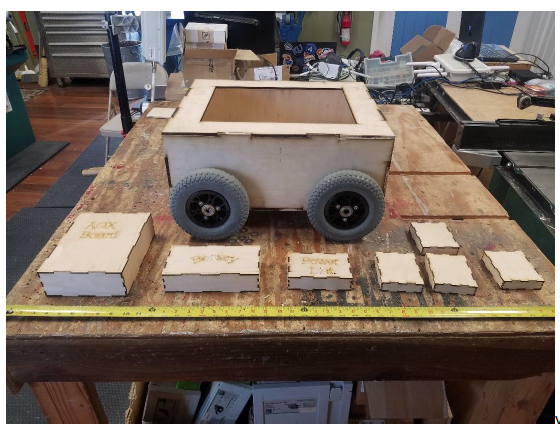
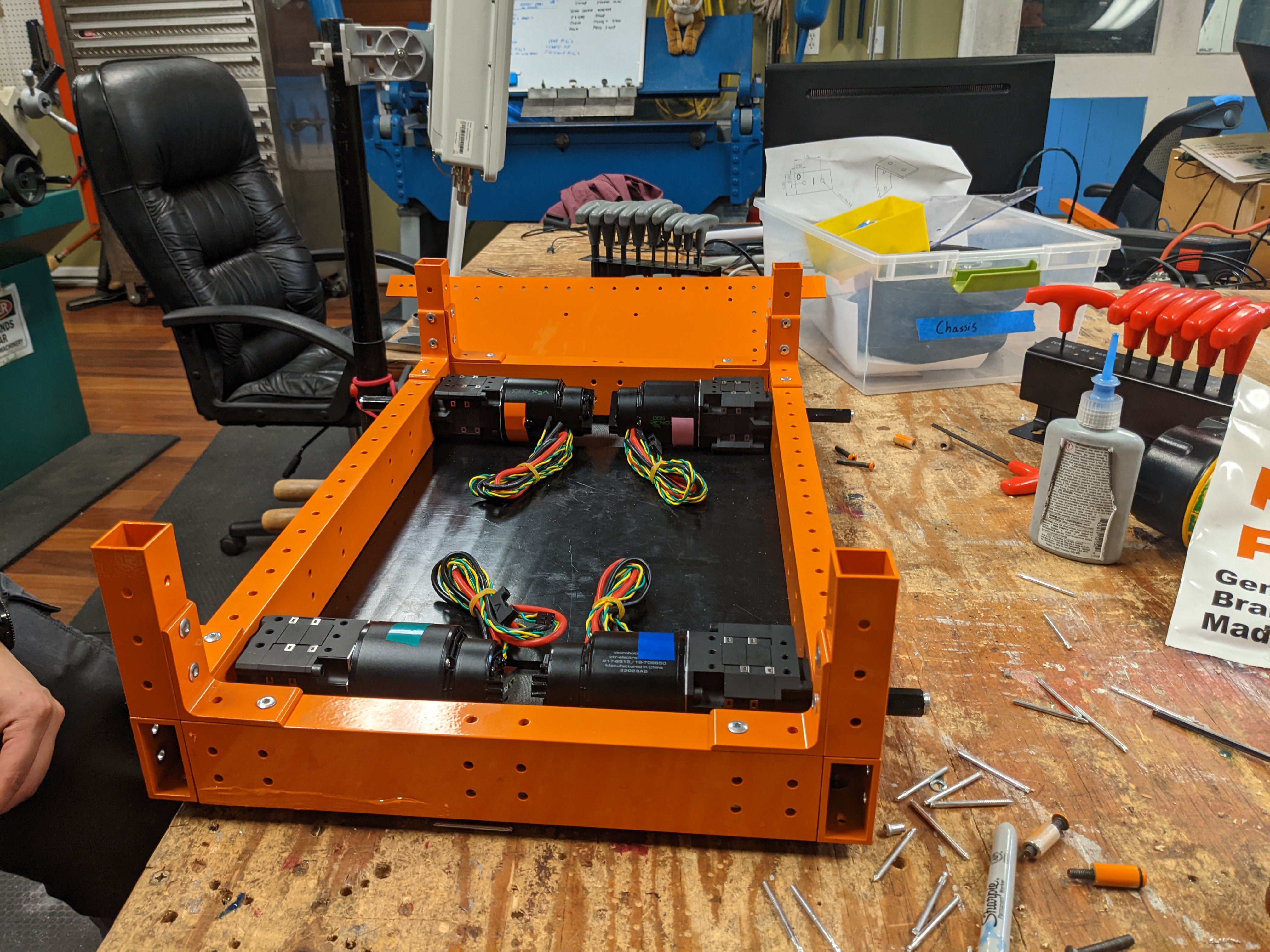
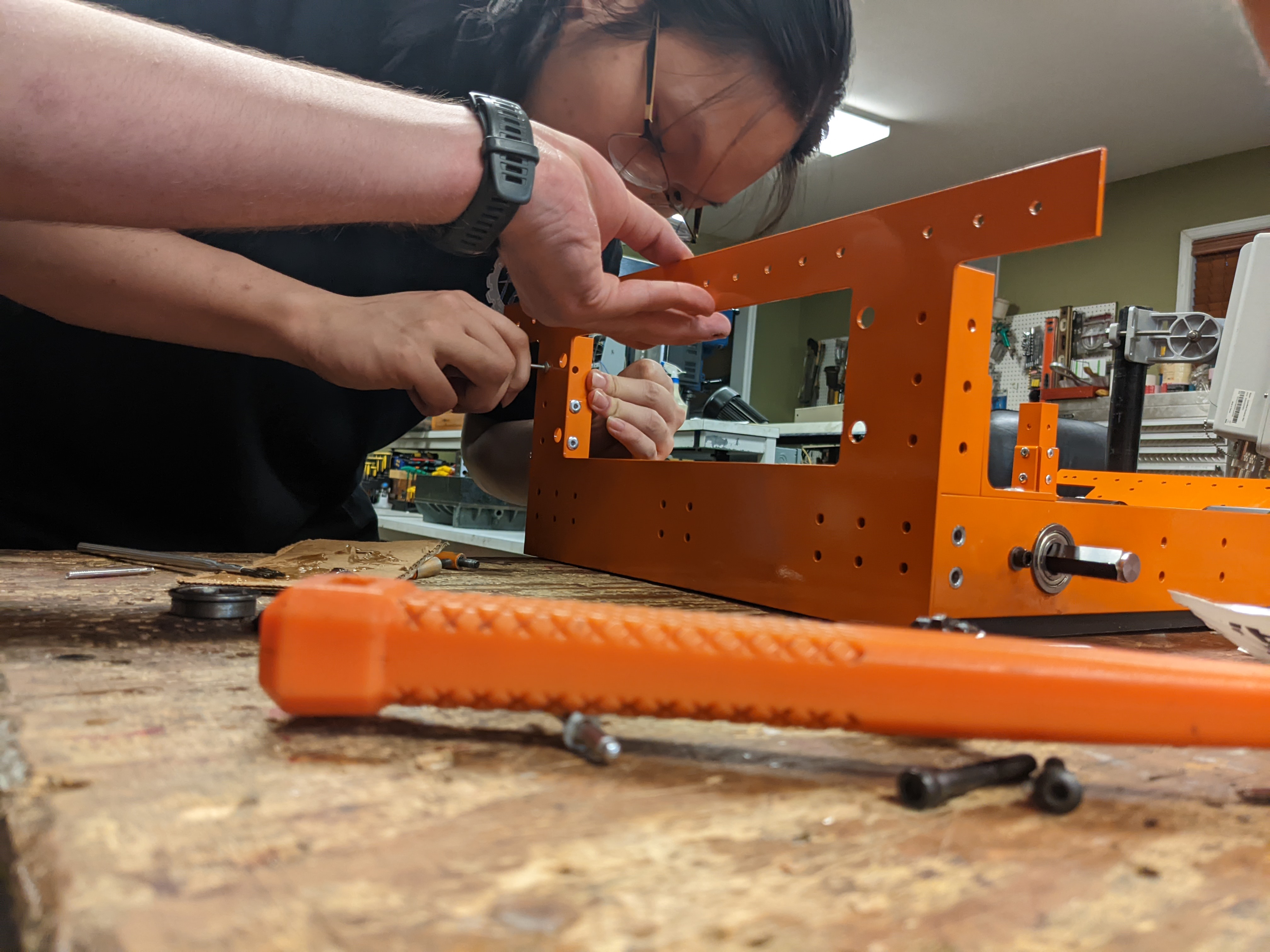
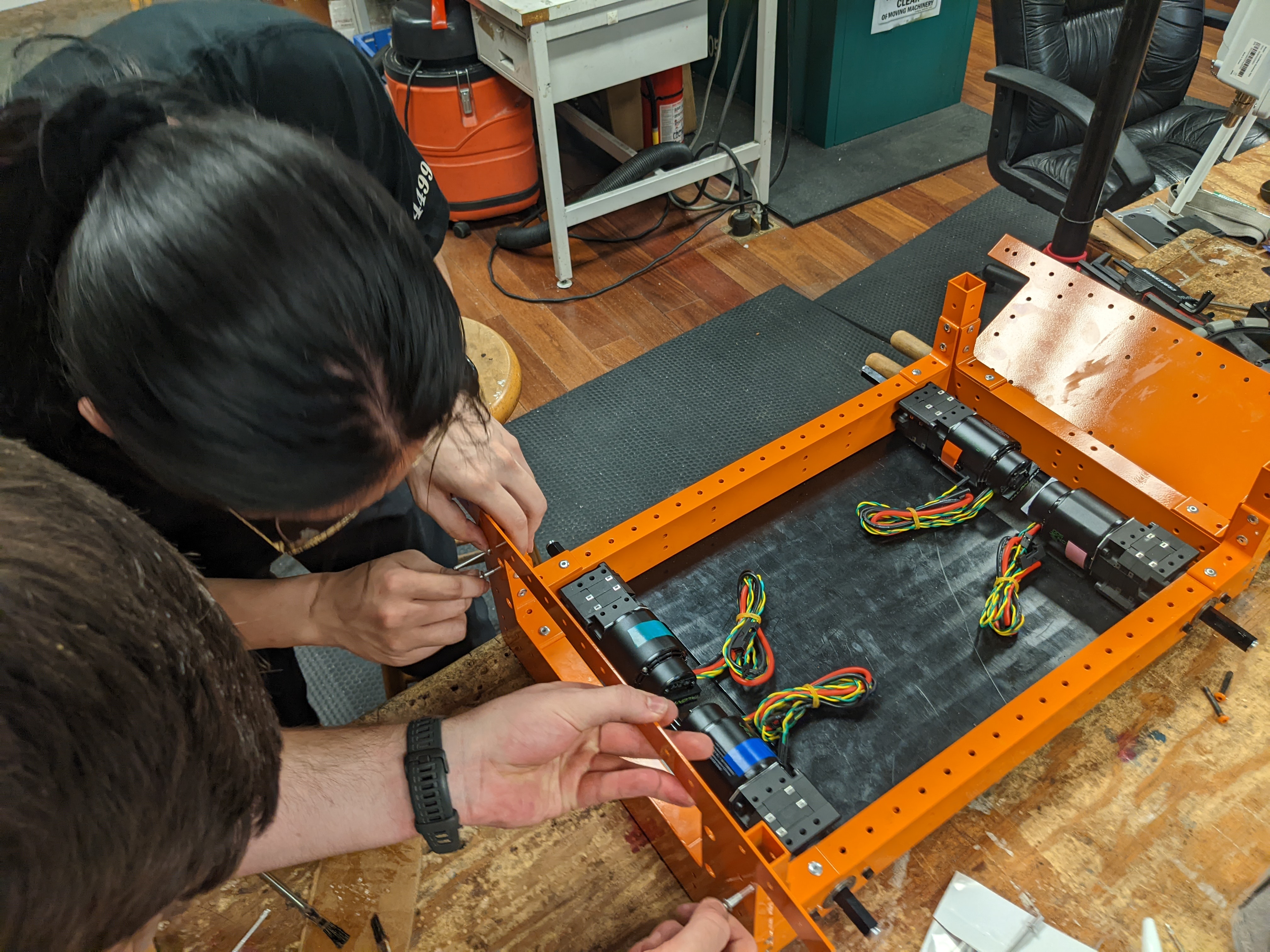
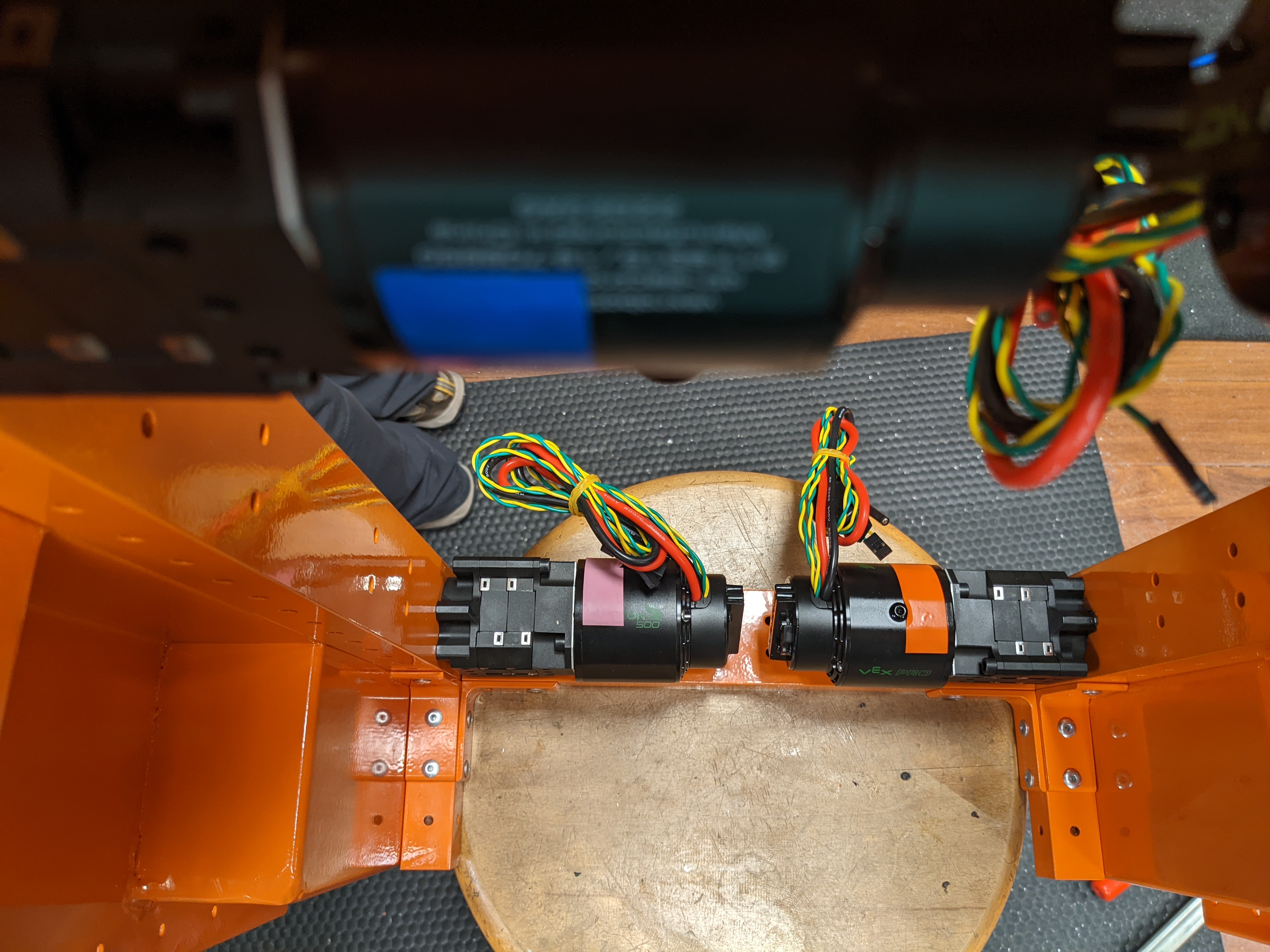
10 Team members and 5 alumni partnered with one of our sponsors, Neaera Consulting, to create a rover to autonomously deploy from an F-150 truck and autonomously place and recover Pi-Lit flares in a specific format based on the parked location of the F-150 vehicle. Neaera is also creating an Eyes on the Ground mobile application that will allow users to control the robot remotely and stream video and sensor data back to the user. The rover, Multi Incident Response Vehicle (MIRV), robot will utilize many sensors, like cameras, GPS, Lidar, and wheel encoders, to autonomously accomplish its goals. Neaera is building this solution using the Robot Operating System that will allow all the different components of the sensors to be broken down into independent ROS (Robot Operating System) nodes. The nodes will communicate via ROS topics with one another and the cloud backend. The project will also take advantage of ROS simulations to simulate the behavior of the robot in multiple different testing environments.